Notice d’utilisation - Interface de contrôle pour set servomoteur Easy-Matic
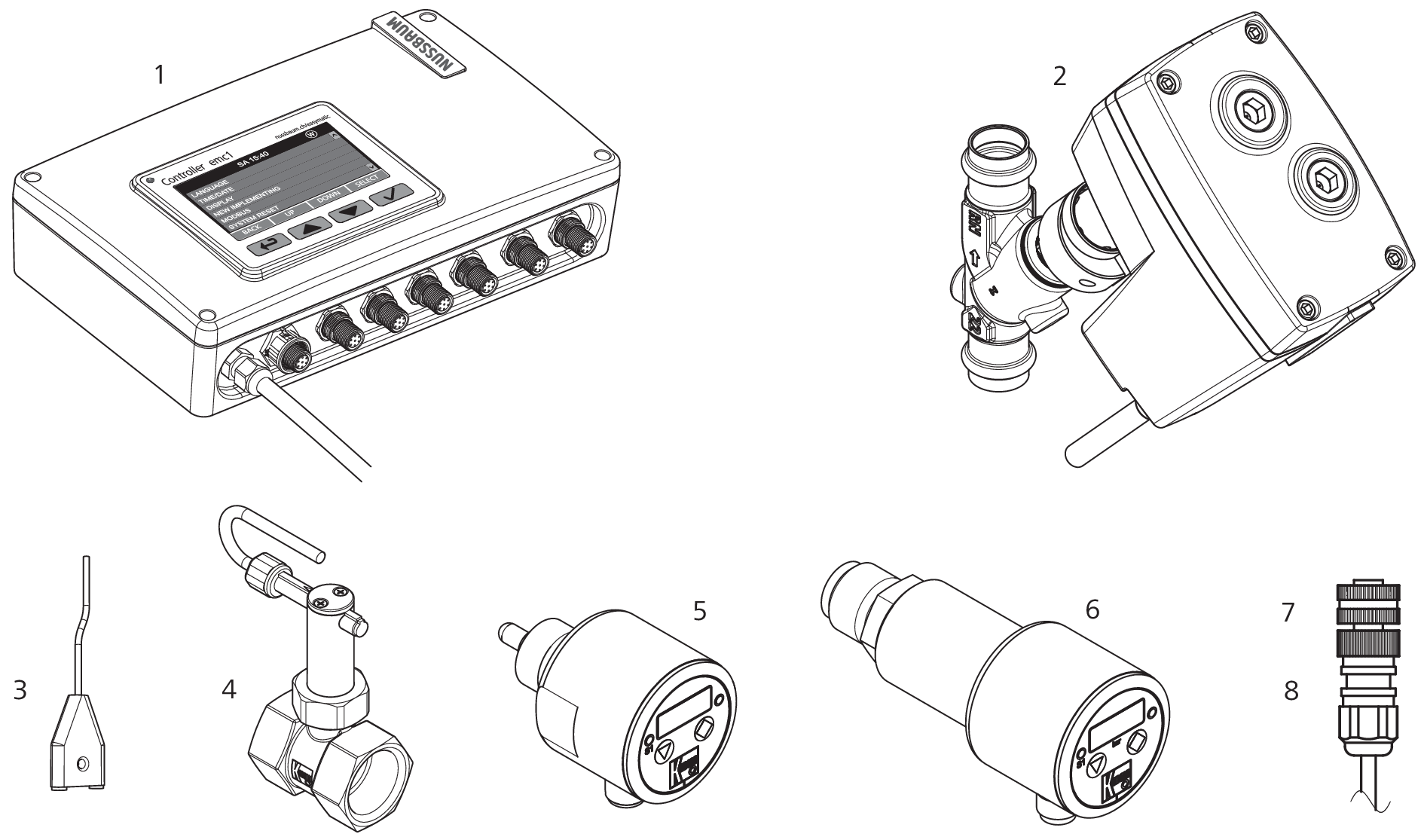
3.1 Structure du système
|
Servomoteur Easy-Matic 23300 constitué d’une: |
|
|
1 |
Interface de contrôle 23305 (montée sur le mur) |
|
2 |
Actuateur 23310 (monté sur le robinet) |
|
Accessoires en option: |
|
|
3 |
Détecteur d’eau 23325 |
|
4 |
Contacteur de protection du débit d’écoulement pour soupape de sûreté (23335) ou disconnecteurs (23336, 23337) |
|
5 |
Contacteur thermique 23327 |
|
6 |
Contacteur de pression 23326 |
|
7 |
Câble d’interface em-digital 23320.21 |
|
8 |
Câble d’interface em-ModBus 23320.22 |
|
Les composants des points (2) à (8) sont équipés d’un câble de branchement qui se branche sur l’interface de contrôle. |
Acheter maintenant





3.2 Structure de l’interface de contrôle
3.2.1 Barre de prises
Toutes les connexions sont situées sur le bas de la face avant de l’interface de contrôle. Chaque prise est dûment identifiée.

3.2.2 Affichage et boutons de commande

|
1 |
Témoin LED d’indication d’état:
|
|
2 |
Affichage couleur, éclairé |
|
3 |
Touche: retour* |
|
4 |
Touche: vers le haut* |
|
5 |
Touche: vers le bas* |
|
6 |
Touche: confirmer le choix* |
|
* |
La fonction des touches dépend du contexte et est indiquée par les touches logicielles sur l’affichage (voir 👉 Affichage). |
3.2.3 Affichage

|
Pos. |
Désignation |
Fonction |
|---|---|---|
|
1 |
Minuterie |
S’affiche lorsque va se déclencher une minuterie. |
|
2 |
Contrôle externe |
S’affiche lorsque l’actuateur est commandé par une interface externe. |
|
3 |
Fonctionnement manuel en cours |
S’affiche lorsque le fonctionnement manuel a été activé sur l’actuateur. |
|
4 |
Jour et heure |
Indique la journée et l’heure actuelles conformément aux réglages de l’utilisateur. |
|
5 |
Capteurs raccordés |
S’affiche lorsqu’un capteur est raccordé. Les capteurs actifs qui sont en train d’envoyer un signal pour fermer le robinet s’affichent sur fond rouge. Les lettres ci-dessous désignent les capteurs suivants:
|
|
6 |
Ligne de commande |
Permet la sélection et l’entrée de réglages. La ligne sélectionnée s’affiche sur fond blanc. Les champs de saisie actifs s’affichent sur fond bleu clair. |
|
7 |
Symboles de défilement |
S’affichent lorsque d’autres lignes de commande sont disponibles. |
|
8 |
Touches logicielles |
Affichent la fonction des touches. |
Pour toute information complémentaire, voir 👉 Signaux et priorisation.
3.3 Fonction
3.3.1 Signaux et priorisation
Le tableau suivant présente les divers commutations et signaux que l’interface de contrôle est capable de traiter. En outre, il est indiqué une priorisation au cas où plusieurs signaux seraient émis en même temps.
|
Prio |
Signal |
Description |
|---|---|---|
|
1 |
Commutation manuelle sur l’interface de contrôle |
Sur l’interface de contrôle, les touches permettent d’ouvrir et de fermer directement le robinet. |
|
2 |
Commutation du capteur |
L’interface de contrôle possède 4 interfaces pour le raccordement de capteurs (plug & play). Lorsque la valeur limite définie comme point de commutation sur le capteur est atteinte, le capteur envoie le signal qui déclenche la fermeture du robinet. Si aucun actuateur n’est raccordé, le signal est reconnu quand même et peut être p. ex. traité par des interfaces externes. |
|
3 |
Commutation par des interfaces externes |
L’interface de contrôle peut être intégrée dans le système de gestion de bâtiment via ModBus ou une interface digitale, ou être reliée à des appareils de saisie et de signalisation externes. |
|
4 |
Commutation de la minuterie |
Sur l’interface de contrôle, on peut programmer une commutation de la minuterie, ce afin d’ouvrir et de fermer le robinet. |
En plus, une vis sur l’actuateur permet d’ouvrir et de fermer manuellement le robinet.
Un signal est émis dans les cas suivants:
-
L’actuateur a été actionné mécaniquement.
-
Un capteur a émis le signal pour déclencher la fermeture.
-
Une erreur est survenue.
Tous les réglages, signaux et actions sont consignés dans un protocole d’activités (jusqu’à 10 000 entrées).
3.3.2 Domaines d’utilisation typiques
Le tableau suivant donne un aperçu des domaines d’utilisation typiques
|
Signal |
Lieu d’utilisation |
Fonction |
|---|---|---|
|
Commutation de la minuterie |
Equipements de laboratoires, hôtels et appartements de vacances |
Couper l’arrivée d’eau en cas de non-utilisation |
|
Puits |
Restreindre l’utilisation à des périodes définies |
|
|
Terrains de sport et autres points de soutirage dans les lieux publiques |
Eviter une consommation intempestive de l’eau |
|
|
Détecteur d’eau |
Locaux où ont été posées des conduites d’eau |
Fermer le robinet d’arrêt pour empêcher l’écoulement d’eau en cas de fuite |
|
Contacteur de pression |
Installations de chauffe-eau à accumulation et installations industrielles |
En cas de sur-pression, fermer le robinet d’arrêt de la conduite pour limiter le pression |
|
Contacteur thermique |
Production d’eau chaude |
Fermer le robinet d’arrêt lorsque la température de consigne est atteinte |
|
Contacteur de protection du débit d’écoulement |
Disconnecteur BA |
Lorsque de l’eau s’écoule de la soupape de décharge, fermer le robinet d’arrêt de la conduite d’alimentation pour empêcher un retour dans le réseau d’alimentation |
|
Soupape de sûreté |
Lorsque de l’eau s’écoule de la soupape de sûreté, fermer le robinet d’arrêt de la conduite d’alimentation pour empêcher que la pression ne continue de monter |
|
|
Exploitation avec des interfaces externes, avec ou sans actuateur |
Divers |
Automatisme du bâtiment et surveillance: les données des capteurs enregistrées par l’interface de contrôle sont retransmises à des interfaces externes en vue de leur traitement ultérieur |
3.5 Accessoires
En plus de l’actuateur 23310, peuvent être raccordés à l’interface de contrôle, les composants suivants:
-
Capteurs pour des commutations en fonction des mesures réalisées
-
Contacteur de pression 23326 pour surveiller la pression d’écoulement dans le système de conduites (pression minimale ou maximale réglable)
-
Contacteur thermique 23327 pour surveiller la pression d’écoulement dans le système de conduites (pression minimale ou maximale réglable)
-
Détecteur d’eau 23325 pour surveiller la présence d’eau au ras du sol
-
Contacteurs de protection du débit d’écoulement 23336 et 23337 pour surveiller l’eau qui s’écoule au niveau du disconnecteur BA/CA
-
Contacteur de protection du débit d’écoulement 23335 pour surveiller l’eau au niveau de la soupape de sûreté
-
-
Câble d’interface pour la commande via une interface numérique ou une interface ModBus
Acheter maintenant



3.6 Protocole de communication ModBus
Le présent chapitre contient des paramètres spécifiques pour la transmission des données ModBus du système Easy-Matic.
Sur les pages web de l’organisation du Modbus, on peut en plus télécharger les documents suivants pour disposer d’informations générales:
-
«Modbus over Serial Line Specification and Implementation Guide» (modbus.org/docs/Modbus_over_serial_line_V1_02.pdf)
-
«Modbus Application Protocol Specification» (modbus.org/docs/Modbus_Application_Protocol_V1_1b3.pdf )
3.6.1 Paramètres de communication
Le ModBus mis en œuvre correspond à un bus à 2 fils (RS 485) à protocole RTU.
|
Paramètre |
Valeur |
|---|---|
|
Débit en bauds |
4800, 9600*, 19200, 8400 |
|
Bits de données |
8 |
|
Parité |
Paire (even) |
|
Bits d’arrêt |
1 |
* Paramétrage standard
Pour le débit en bauds, on peut choisir entre 4 réglages, (👉 Paramétrer le débit en bauds du Modbus).
3.6.2 Codes de fonction
Les codes de fonction suivants sont pris en charge:
|
Code de fonction |
Description |
|---|---|
|
02 |
Read Discrete Inputs |
|
03 |
Read Holding Registers |
|
05 |
Write Single Coil |
|
16 |
Write Multiple Registers |
3.6.3 Coils
Dans le tableau suivant figurent les coils pour l’exploitation du robinet:
|
Coil |
R/W |
Description |
|---|---|---|
|
1 |
WO |
Instructs the valve to open |
|
2 |
WO |
Instructs the valve to close |
|
3 |
WO |
Instructs the valve to stop |
|
4 |
WO |
Instructs the valve to home |
3.6.4 Entrées discrètes
Dans le tableau suivant figurent les entrées discrètes (Discrete Inputs) qui servent à surveiller l’état d’alerte du capteur.
|
Entrée |
R/W |
Description |
|---|---|---|
|
10 |
RO |
Sensor Alarm. Set if at least one sensor is in alarm. |
|
11 |
RO |
Water Present Alarm. Set if any water sensor is in alarm. |
|
12 |
RO |
Over Pressure Alarm. Set if any pressure sensor is in alarm. |
|
13 |
RO |
Over Temperature Alarm. Set if any temperature sensor is in alarm. |
|
14 |
RO |
Flow Detected Alarm. Set if any flow detect sensor is in alarm. |
3.6.5 Registres
Dans le tableau suivant figurent les registres utilisés:
|
Reg |
Qty |
R/W |
Description et valeurs |
|---|---|---|---|
|
10 |
5 |
RO |
VAC Firmware Version (Read Only) |
|
100 |
1 |
RO |
Alarm State: Bit flag of which alarms are currently in effect. If an alarm is active, the bit will be Set (1). If an alarm in not active, the bit will be clear (0). Several bits can be set at the same time to indicate simultaneous alarms.
|
|
101 |
1 |
RO |
The state of the sensor connected to Input 1. High Byte – The type of sensor that is connected.
Low Byte – The current sensor state.
|
|
102 |
1 |
RO |
The state of the Sensor connected to Input 2. (Description as for 101) |
|
103 |
1 |
RO |
The state of the Sensor connected to Input 3. (Description as for 101) |
|
104 |
1 |
RO |
The state of the Sensor connected to Input 4. (Description as for 101) |
|
105 |
1 |
WO |
Control Valve
|
|
106 |
1 |
RO |
Read Valve Status
|
|
110 |
4 |
RW |
Read/set on board Real Time Clock
NOTE: The values used for writing need to be in the ranges above. |
|
113 |
5 |
RO |
VAC Serial Number |
3.7 Comportement en cas de panne de courant
Si une panne de courant dure plus de 2 secondes, l’actuateur reste dans sa position. Lorsque le courant est rétabli, l’actuateur se referme indépendamment de sa position d’arrêt, pour ensuite reprendre une course de référence.
|
Etat lors de la panne de courant |
Comportement après panne de courant > 2 s |
|---|---|
|
Fermé |
Reste fermé |
|
Ouvert |
Se ferme lentement puis se rouvre |
|
S’ouvre |
Se ferme lentement puis se rouvre |
|
Se ferme |
Se ferme |

Durant la panne de courant, il n’est pas tenu compte des signaux des capteurs, de la configuration de la minuterie et des signaux des interfaces externes.
Dans le fichier log, la coupure de courant est consignée sous [Powerup].